簡(jiǎn)介:在過(guò)去幾年中,Sharp開(kāi)發(fā)了很多種紅外距離傳感器。這些傳感器不但體積小,功耗也很低。這篇文章就簡(jiǎn)單的介紹一下這些傳感器的不同點(diǎn),使用方法,接口方法以及一些使用上的小技巧。
工作原理:
Sharp的紅外傳感器都是基于一個(gè)原理,三角測(cè)量原理。紅外發(fā)射器按照一定的角度發(fā)射紅外光束,當(dāng)遇到物體以后,光束會(huì)反射回來(lái),如圖1所示。反射回來(lái)的紅外光線被CCD檢測(cè)器檢測(cè)到以后,會(huì)獲得一個(gè)偏移值L,利用三角關(guān)系,在知道了發(fā)射角度a,偏移距L,中心矩X,以及濾鏡的焦距f以后,傳感器到物體的距離D就可以通過(guò)幾何關(guān)系計(jì)算出來(lái)了。
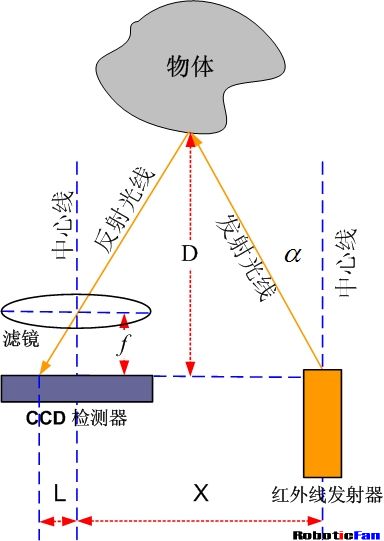
圖1:三角測(cè)量原理
可以看到,當(dāng)D的距離足夠近的時(shí)候,L值會(huì)相當(dāng)大,超過(guò)CCD的探測(cè)范圍,這時(shí),雖然物體很近,但是傳感器反而看不到了。當(dāng)物體距離D很大時(shí),L值就會(huì)很小。這時(shí)CCD檢測(cè)器能否分辨得出這個(gè)很小的L值成為關(guān)鍵,也就是說(shuō)CCD的分辨率決定能不能獲得足夠精確的L值。要檢測(cè)越是遠(yuǎn)的物體,CCD的分辨率要求就越高。
非線性輸出:
Sharp GS2XX系列的傳感器的輸出是非線性的。沒(méi)個(gè)型號(hào)的輸出曲線都不同。所以,在實(shí)際使用前,最好能對(duì)所使用的傳感器進(jìn)行一下校正。對(duì)每個(gè)型號(hào)的傳感器創(chuàng)建一張曲線圖,以便在實(shí)際使用中獲得真實(shí)有效的測(cè)量數(shù)據(jù)。下圖是典型的Sharp GP2D12的輸出曲線圖。
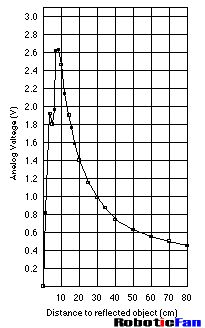
圖2:Sharp GP2D12輸出曲線
從上圖中,可以看到,當(dāng)被探測(cè)物體的距離小于10cm的時(shí)候,輸出電壓急劇下降,也就是說(shuō)從電壓讀數(shù)來(lái)看,物體的距離應(yīng)該是越來(lái)越遠(yuǎn)了。但是實(shí)際上并不是這樣的,想象一下,你的機(jī)器人本來(lái)正在慢慢的靠近障礙物,突然發(fā)現(xiàn)障礙物消失了,一般來(lái)說(shuō),你的控制程序會(huì)讓你的機(jī)器人以全速移動(dòng),結(jié)果就是,"砰"的一聲。當(dāng)然了,解決這個(gè)方法也不是沒(méi)有,這里有個(gè)小技巧。只需要改變一下傳感器的安裝位置,使它到機(jī)器人的外圍的距離大于最小探測(cè)距離就可以了。如圖3所示:
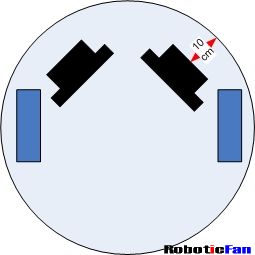
圖3:可以避免探測(cè)誤差的安裝圖示
型號(hào)對(duì)比:
目前Sharp的紅外線傳感器有如下幾種類型:
GP2D02 (串口輸出)探測(cè)范圍 10cm-80cm
GP2D05 (數(shù)字輸出)探測(cè)范圍 固定的24cm
GP2D12 (模擬輸出)探測(cè)范圍 10cm-80cm
GP2D15 (數(shù)字輸出)探測(cè)范圍 24cm
GP2D120 (模擬輸出)探測(cè)范圍 4cm-30cm
GP2YOAO2YK (模擬輸出)探測(cè)范圍 20cm-150cm
GP2Y0D02YK (數(shù)字輸出)探測(cè)范圍 80cm
所有的模擬輸出,其輸出電壓和距離成反比,數(shù)字輸出只能檢測(cè)在范圍內(nèi)物體是存在還是不存在,而不能提供距離的檢測(cè)。
原文鏈接:http://www.roboticfan.com/blog/user_2005/1/archives/2006/2006834719.shtml
(轉(zhuǎn)載聲明:凡文章出處為www.RoboticFan.com的,系RoboticFan原創(chuàng)文章,其它媒體可以自由轉(zhuǎn)載,但請(qǐng)注明出處!)